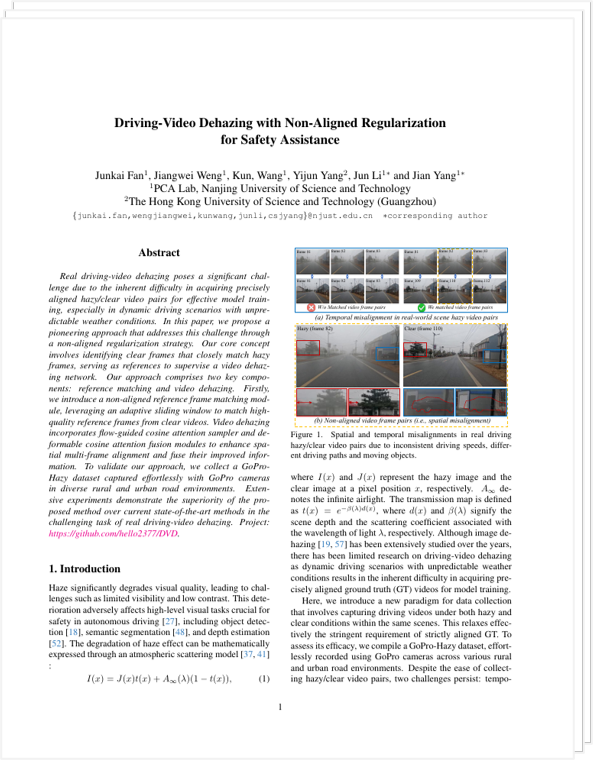
Driving-Video Dehazing with Non-Aligned Regularization
for Safety Assistance
CVPR 2024
- Junkai Fan1
- Jiangwei Weng1
- Kun Wang1
- Yijun Yang2
- Jianjun Qian1
- Jun Li*1
- Jian Yang*1
-
1Nanjing University of Science and Technology
2The Hong Kong University of Science and Technology (Guangzhou)
Video Results
Abstract
Real driving-video dehazing poses a significant challenge due to the inherent difficulty in acquiring precisely aligned hazy/clear video pairs for effective model training, especially in dynamic driving scenarios with unpredictable weather conditions. In this paper, we propose a pioneering approach that addresses this challenge through a non-aligned regularization strategy. Our core concept involves identifying clear frames that closely match hazy frames, serving as references to supervise a video dehazing network. Our approach comprises two key components: reference matching and video dehazing. Firstly, we introduce a non-aligned reference frame matching module, leveraging an adaptive sliding window to match high-quality reference frames from clear videos. Video dehazing incorporates flow-guided cosine attention sampler and deformable cosine attention fusion modules to enhance spatial multi-frame alignment and fuse their improved information. To validate our approach, we collect a GoPro-Hazy dataset captured effortlessly with GoPro cameras in diverse rural and urban road environments. Extensive experiments demonstrate the superiority of the proposed method over current state-of-the-art methods in the challenging task of real driving-video dehazing.
GoProHazy and DrivingHazy Datasets

|
|
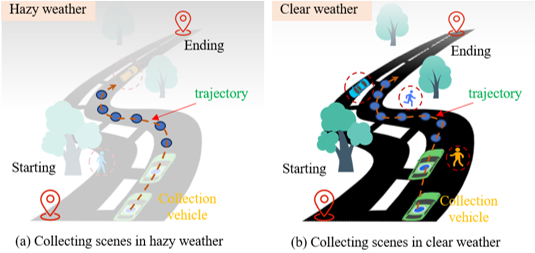
| Collection Settings. | Collection Method. |
To collect pairs of hazy/clear video pairs, follow these steps: 1). As illustrated in Collection Method (a), we capture hazy videos in various scenes under hazy weather conditions.
2). In Collection Method (b), to maintain consistent scene brightness, we choose overcast days with good visibility
for capturing clear video pairs. Additionally, to ensure the reference clear video matches the hazy scene,
we align clear video capture with the starting point of the hazy videos.
3). Video cropping is employed to ensure that the starting and ending points of the collected hazy/clear
video pairs are consistent.
Data Statistical

Our GoProHazy and DrivingHazy datasets predominantly feature urban road scenarios, where hazy density is primarily observed within a visibility range of 0-100 meters.
Method
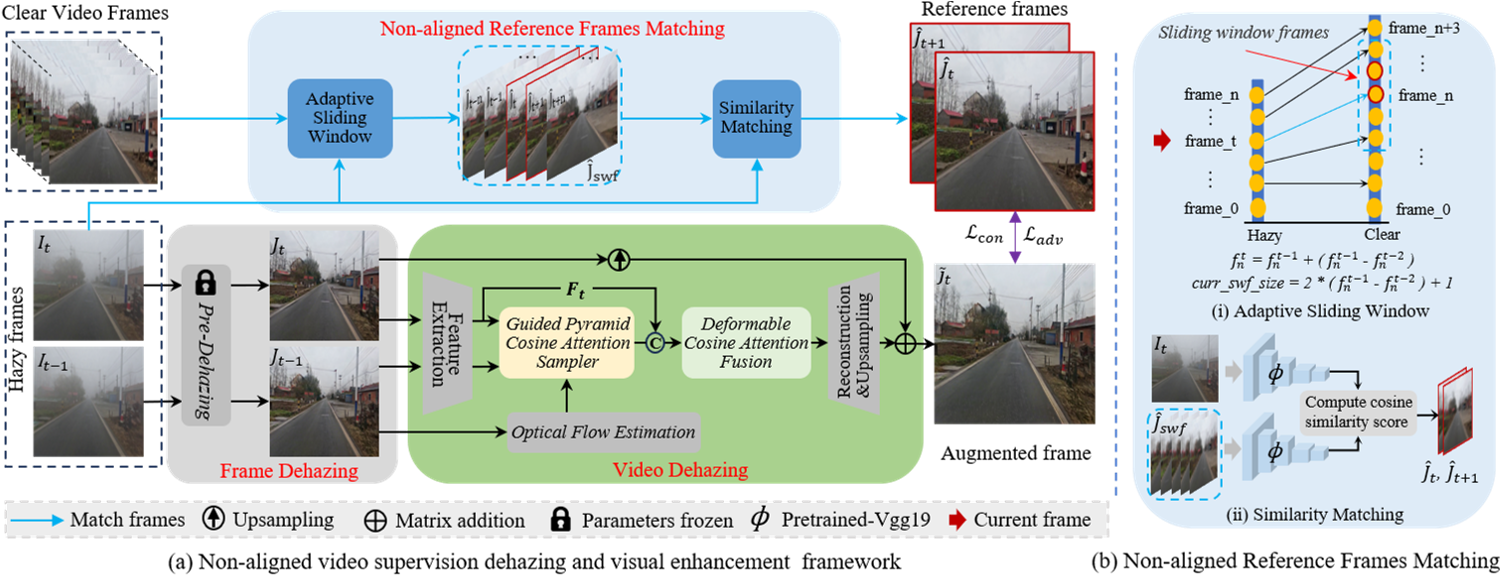
(a) The overall framework of our driving-video dehazing comprising two crucial components: frame matching and video dehazing.
This involves applying frame dehazing to proactively eliminate haze from individual frames. One significant benefit is is the
effectiveness and efficiency of our method in training the video dehazing network using authentic driving data without requiring strict
alignment, ultimately producing high-quality results. (b) The illustration depicts the matching process of non-aligned, clear reference
frames through the utilization of an adaptive sliding window using feature cosine similarity.
Results
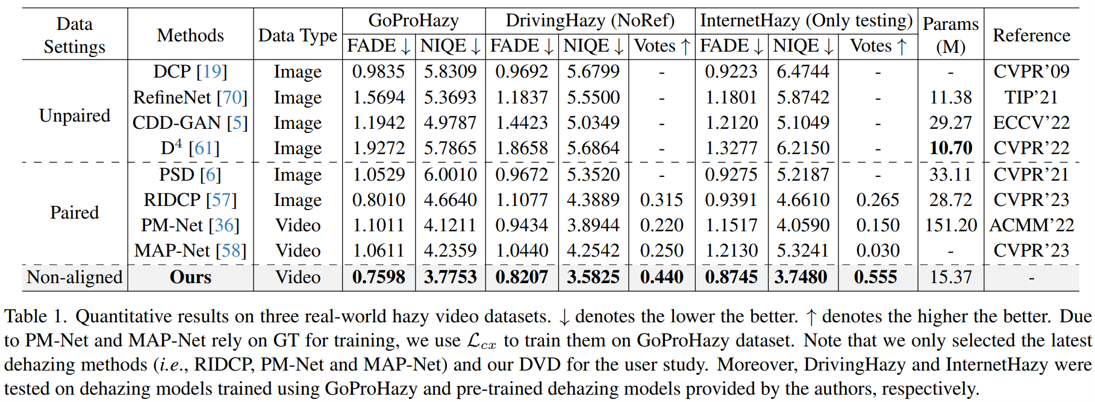

Comparison of video dehazing results on the real-world GoProHazy dataset. Our method can remove distant hazy and our method removes distant haze and produces clear images resembling non-aligned reference frames.

Testing results on DrivingHazy. Our method can perform dehazing in real driving environments while preserving the brightness.

Testing with the pre-trained model provided by the authors on the InternetHazy dataset, our method still performs well in dehazing. The red box corresponds to the zoomed-in patch for better comparison.
Citation
If you find our work useful in your research, please consider citing:
Acknowledgements
Thanks to Ricardo Martin-Brualla and David Salesin for their comments on the text, and to George Drettakis and Georgios Kopanas for graciously assisting us with our baseline evaluation.
The website template was borrowed from Michaël Gharbi.